It is hard for a robot (or human) to precisely assemble a close fitting part. Compliant motion makes use of parts that deliberately allow some initial inaccuracy (for example bolts with a tapered end) and pressure feedback so that parts can be placed in the approxmate position and then adjusted by sliding or twisting.
Used in Chap. 15: pages 230, 233, 234, 235
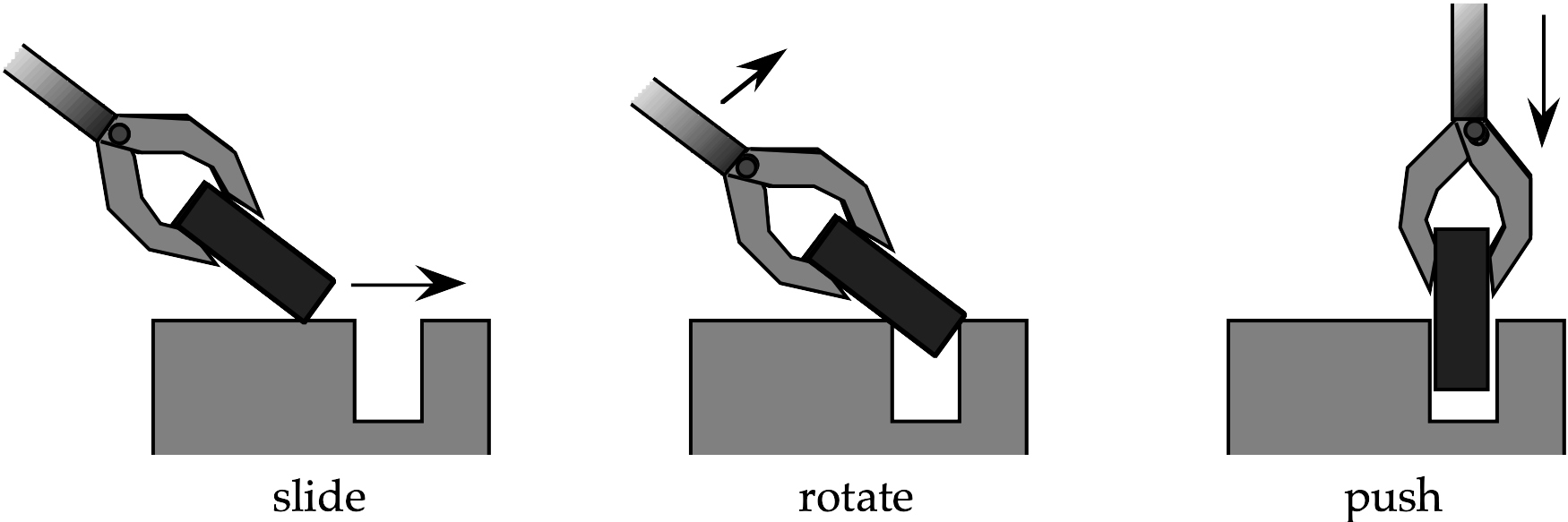
Compliant motion