In robotics, global planning is the part of route planning that deals with finding the best overall route across large spaces, but ignores fine details. This is in contrast to local planning, which is about dealing with small scale navigation including obstacle avoidance or navigating through doorways or corridors. One way to do this is using a configuration space which creates margins around obstacles so that the route planning can focus on the centre of the robot. At a higher level one can separate a large space into rooms or open spaces, with paths or corridors between them; at this scale, obstacles where the gaps are too small to navigate are treated as barriers just as though they were solid walls.
Used in Chap. 15: pages 222, 226, 227, 234
Used in glossary entries: configuration space, local planning, obstacle avoidance, robotics, route planning

Configuration space.

Circle-based configuration space
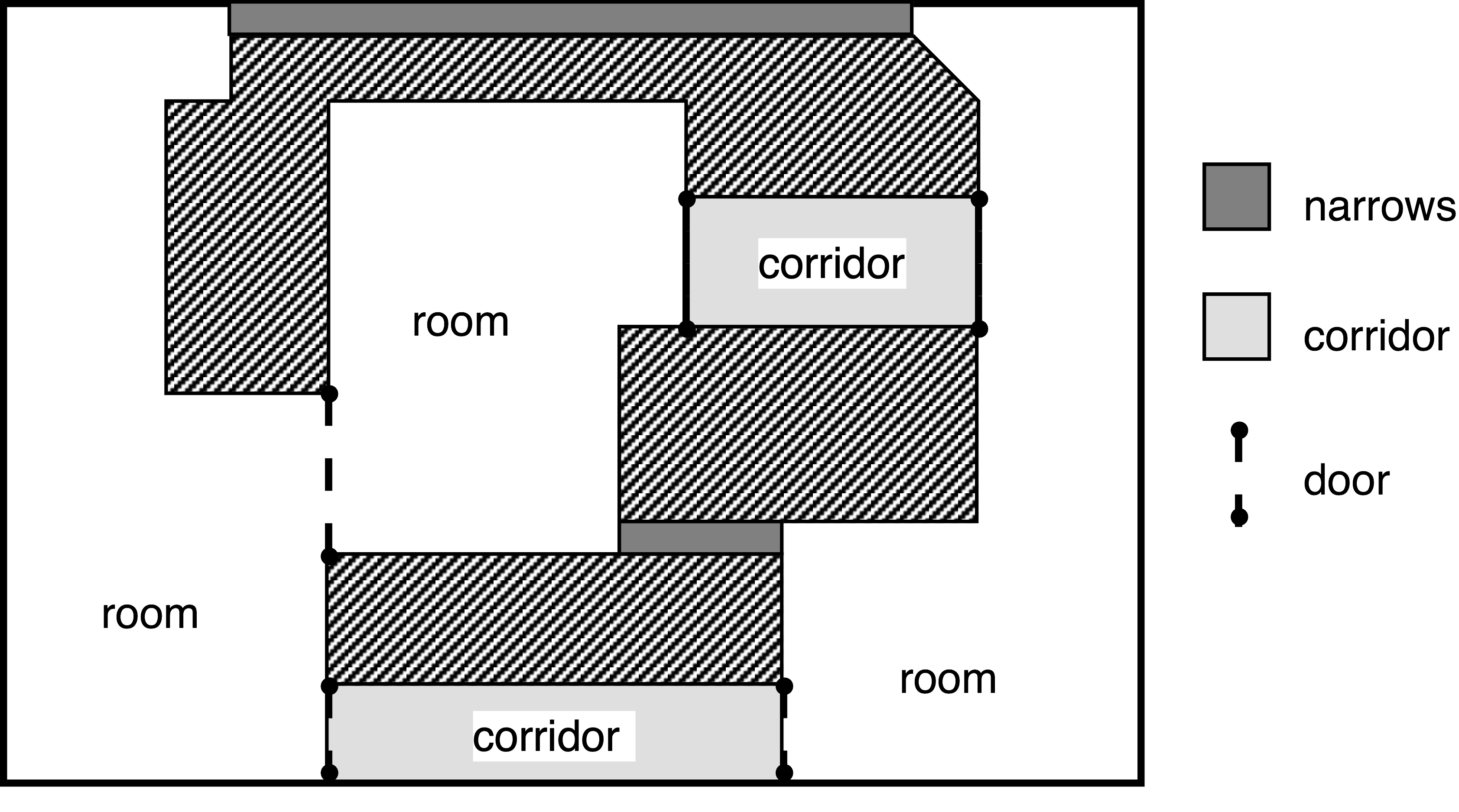
Corridors and rooms between obstacles